PARTIAL ORDER PLANNING (POP)
Partial Order Planning (POP) adalah sebuah pendekatan untuk perencanaan otomatis yang meninggalkan keputusan tentang pemesanan tindakan seterbuka mungkin.Ini kontras dengan perencanaan keseluruhan-order , yang menghasilkan urutan yang tepat dari tindakan.

Step 1

Step 2

Step 3

Step 4

Step 5

Step 6

Step 7

Step 8

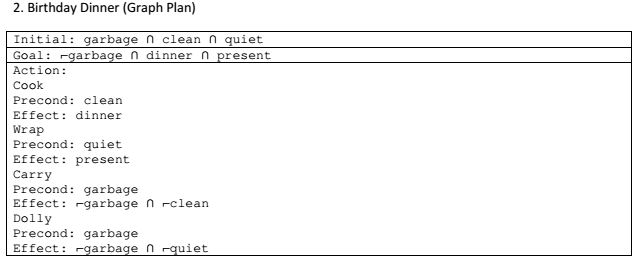
GRAPH PLAN
Graph Plan adalah adalah algoritma untuk perencanaan otomatis yang
dikembangkan oleh Avrim Blum dan Merrick Furst pada tahun 1995.
Graphplan mengambil sebagai masukan masalah perencanaan dinyatakan dalam
strip dan menghasilkan, jika salah satu kemungkinan, urutan operasi
untuk mencapai keadaan tujuan.














Referensi :
0 Komentar